随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。然而至今没有任何一种方法能够在任意环境使机器人进行有效地避障,如何克服相关算法的局限性是今后工作的研究方向之一。

移动机器人的避障是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,达到目标点。目前移动机器人的避障根据环境信息的掌握程度可以分为障碍物信息已知、障碍物信息部分未知或完全未知两种。为此实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。
机器人避障算法有传统的导航避障方法如可视图法、栅格法、自由空间法等算法对障碍物信息己知时的避障问题处理尚可,而实际生活中,绝大多数的情况下,机器人所处的环境都是动态的、可变的、未知的所以当障碍信息未知或者障碍是可移动的时候,传统的导航方法一般不能很好的解决避障问题或者根本不能避障。为了解决上述问题,人们引入了计算机和人工智能等领域的一些算法。同时得益于处理器计算能力的提高及传感器技术的发展,在移动机器人的平台上进行一些复杂算法的运算也变得轻松,由此产生了一系列智能避障方法,比较热门的有:遗传算法、神经网络算法、模糊算法等。
在传感器避障领域,采用单一的传感器测量的效果并不理想,在实际应用中往往需要采用其他类型的传感器进行补偿,才能实现对周围环境的探测的佳效果。当然,这就产生了多传感器信息的融合处理的问题,增大了信息处理的工作量和难度。除了这种传感器避障方法,还有很多其他方法融合处理多种传感器信息,让全自主机器人实现完美避障,比如:
超声波声波避障控制法能够实时监测长距离超声波传感器,为机器人搜索开阔路径。当机器人离障碍物还有一定距离时,超声波传感器就能够检测到相关信息,并据此控制机器人离开。然而,超声波传感器对非常接近的物体会探测不到,这个距离称为物理探测盲区。在刚发射信号的时候,返回信号的阈值会被设定得很高以防止发射波直接触发接收器,因此如果检测的距离很短、阈值没有下降,返回信号已经到达接收器,这时接收器会认为这个返回信号是刚发出的信号从而拒绝接收,使超声波传感器形成一个探测盲区,无法对近距离物体探测。另一个缺陷是,如果在一个比较小的转弯角度上安装有平滑的表面,该表面能够将声纳波束向前反射,而不是反射回机器人。在这种情况下,由于没有回波返回,传感器就会产生一次漏报,机器人也会因此认为在自己行走的路径上没有障碍物存在。

此时,声波避障行为不能得以触发,也就无法避障。目前由工釆网提供的超声波避障传感器MB1043是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,使得测量出来的距离数据更加精准。应用于室内环境,它是一款很不错的低成本解决方案。
然而,机器人光知道哪个方向有障碍物并不够,还必须知道障碍物距离自己具体有多远,才好判断下一步的行动。这时我们就需要测距传感器。
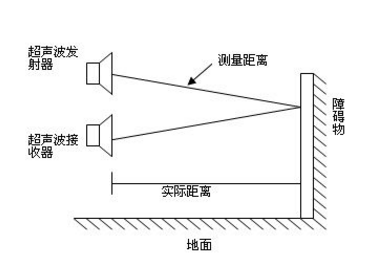
测距传感器大多为非接触式的,目前在个人机器人制作领域用得比较多的是红外测距传感器和超声波测距传感器两种。超声波测距传感器也是一种很常见的测距传感器,该传感器检测距离原理是向外发出超声波,并接收来自物体反射的回波。通过结合接收回波的时间和波速,从而推测出物体的距离。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间,但是会有一个小探测盲区,一般在几十毫米。由于超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用的传感器。
再者,不同材料对声波的反射或者吸引是不相同的,还有多个超声传感器之间有可能会互相干扰,这都是实际应用的过程中需要考虑的。从原理上来讲,没有哪个传感器是完美的,比方说机器人面前是一块完全透明的玻璃,那么采用红外、激光雷达或视觉的方案,就可能因为光线直接穿过玻璃导致检测失败;例如超声波测距,一般需要超声阵列,而阵列之间的传感器如果同时工作的话,会容易互相产生干扰,传感器A发射的光波反射回来被传感器B接收,导致测量结果出现错误,但是如果按照顺序一个个工作,由于超声波传感器采样的周期相对比较长,会减慢整个采集的速度,对实时避障造成影响,这就要求从硬件的结构到算法都必须设计好,尽可能提高采样速度,减少传感器之间的串扰。这时候就需要MaxBotix 系列人体测距传感器 - MB1014这样的超声波传感器来进行障碍物的侦测。

人体测距传感器MB1014专为行人和对象检测而设计,在同一环境中允许多个传感器同时运行,并且很少或几乎不会受到其他超声波传感器经常发生的相互干扰影响。这款传感器具有15.2cm~6.45m的检测距离、2.5V~5.5V供电、2mA典型电流消耗、42KHz的工作频率、极地的功耗、测量周期短等特点,非常适合多传感器操作或电池供电系统,一旦收到命令开始测距,即获悉周围环境。MB1014的主要特性是具备易于使用的逻辑(高/低)输出、RS232格式串行输出。
转载请注明出处:传感器应用_仪表仪器应用_电子元器件产品 – 工采资讯 http://news.isweek.cn/5816.html



