现在有车一族是越来越多,对于很多新手来说倒车雷达可谓是车辆必须有的设备,然而虽然有倒车雷达的帮助有关倒车发生的剐蹭事故还是经常发生。为解决超声倒车雷达指向性不足和存在探测盲区的缺点,工釆网小编针对倒车雷达有盲区?如何避免视野盲区?等问题咨询了相关的技术人员,他们给出了如下解决方案!
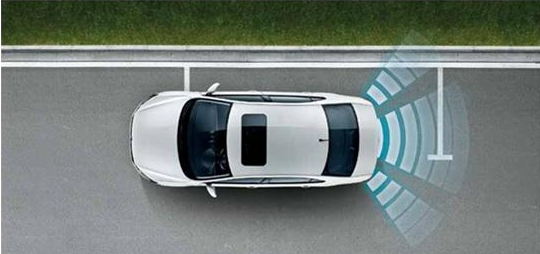
倒车雷达,即“倒车防撞雷达”,也叫“泊车辅助装置”,主要由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。系统采用超声波测距原理,由装置在车尾保险杠上的探头发送超声波撞击障碍物后反射此声波,当遇到障碍物时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理、判断出障碍物的位置,由显示器显示距离并发出其它警示信号,得到及时警示,从而使驾驶者停车、倒车时做到心中有“数”,使倒车变得更安全、更轻松。
汽车的倒车雷达应用了超声波测距系统,目前有两种常用的超声波测距方案。一种是基于单片机或者嵌入式设备的超声波测距系统,一种是基于CPLD(Complex Programmable Logic Device)的超声波测距系统。
倒车雷达中的超声波传感器工作原理
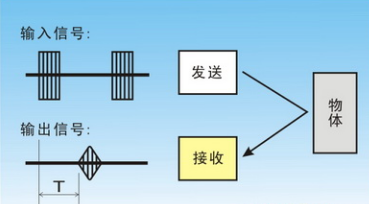
超声波(指频率20kHz以上机械波)是一种特殊的声波,具有声波折射、反射、干涉等基本物理特性。超声波测距传感器通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算出距离长度。超声波发射器向外面某一个方向发射出超声波信号,在发射超声波时刻的同时开始进行计时,超声波通过空气进行传播,传播途中遇到障碍物就会立即返射传播回来,超声波接收器在收到反射波的时刻就立即停止计时。在空气中超声波的传播速度是340m/s,计时器通过记录时间t,就可以测算出从发射点到障碍物之间的距离长度(s),即:s=340t/2。

式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为从发射到接收的时间)。
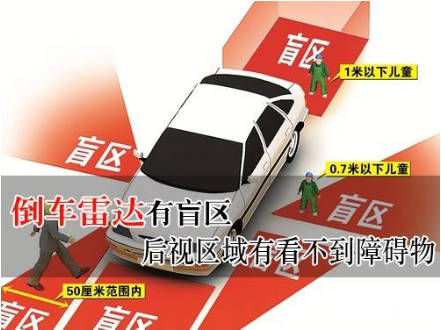
倒车雷达有盲区?如何避免视野盲区?
倒车雷达的探测头后保险杠上安装的超声波传感器,位置通常距地面50至60厘米。探头发射的超声波呈喇叭状向外扩散,区域渐渐变大。这也就意味着,从地面到探头底部,即探头正下方的区域,会形成三角形的盲区。从实践可以得出结论,从地面到低于探头10至15厘米的物体,雷达难以发现。所以倒车雷达是存在一定的视觉盲区的,而且是车身越高盲区越大,低于探头中心10到15厘米以下,障碍物就有可能被探头所忽视,如果离它越近,扫描的范围就越小,危险度越大。除此之外,每个探头发出的超声波都有一定的范围,因此两个探头之间的位置,也会形成盲区。
车辆在倒车的时候,由于倒车雷达确实是存在盲区的,所以咱们在倒车的时候尽量不要过分依赖倒车雷达,倒车前,如果不明后方情况的话,建议下车观察车后状况,小心慢行才是重要的。减慢车速:这样倒车时即便是雷达对障碍物的探测不够敏感,也可在突然报警时做出反应。
工釆网小编温馨提示大家,如果倒车速度太快,倒车雷达上的超声波传感器探头也可能反应不过来,建议司机倒车车速要小于每小时5公里。另外,开始倒车时,应通过反光镜和后视镜不断观察车后方情况,余光还要顾及车前方;遇大型车更应该远离2米以上。特别在绿灯时,不要抢先超过正在转弯的机动车。更不要在红灯时,超越斑马线停留,那样很容易被转弯车辆的内外轮差卷入车轮。
转载请注明出处:传感器应用_仪表仪器应用_电子元器件产品 – 工采资讯 http://news.isweek.cn/5148.html



