随着计算机技术、传感器技术、人工智能的发展,移动机器的避障及自主导航技术已经取得了丰硕的研究成果,应用领域也在不断地扩大,应用复杂程度也越来越高。移动机器人的自主寻路要求已经从之前简单的功能实现提升到可靠性、通用性、高效率上来,因此对其相关技术提出了更高的要求。避障可以说是各种机器人基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。

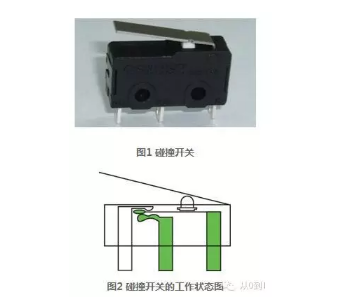
接触式测障传感器便是碰撞开关(图1)。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。当碰撞开关的外部探测臂受到碰撞,探测臂受力下压,带动碰撞开关内部的簧片拨动,从而电路的导通状态发生改变(图2)。
非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。
此外超声波传感器也是移动机器人避障、测距常用传感器之一。超声波传感器是一个电子模块,测量距离在3cm到400cm之间。它可以用于帮助机器人避开障碍物,或用于其他相关项目的距离测量和避障工程。超生波传感器检测距离原理是测出发出超声波并在发射时开始计时,超声波在空中传播,在遇到障碍物时立即返回,超声波接收器接收到反射波时立即停止计时。 声波在空中的传播速度为340米/秒。 使用定时器记录的时间t计算出发点到障碍物的距离s,即s = 340×t / 2。由于超声波在空气中的速度与温湿度有关,在比较精确的测量中,需把温湿度的变化和其它因素考虑进去。超声波传感器一般作用距离较短,普通的有效探测距离都在5-10m之间,但是会有一个小探测盲区,一般在几十毫米。由于超声传感器的成本低,实现方法简单,技术成熟,是移动机器人中常用的传感器。但是传感器安装在机器人上时距离地面不能太近,太近容易产生干扰信号,而且容易将可以翻越的障碍物当成无法逾越的障碍物。传感器两探头间的距离不能太远也不能太近,太远测量误差过大,太近串扰信号过强。
关于机器人测距、避障工釆网小编推荐MaxBotix 机器人超声波传感器 - MB7360

机器人超声波传感器MB7360是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅拥有IP67防尘防水标准封装,而且对干扰噪音做了处理,具备抗噪音干扰能力。同时对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,可选的外部温度补偿,使得测量出来的距离数据更加精准。多种输出方式,包括脉宽、模拟电压、串口,其中直接输出精确的距离读数,节省了MCU的资源,距离方面可测距离长达5米更合适应用于机器人领域。
转载请注明出处:传感器应用_仪表仪器应用_电子元器件产品 – 工采资讯 http://news.isweek.cn/5261.html



