机器人测距传感器,一般分为两种状态:一种测距在即使厘米到数米远的,称作距离传感器;另一种探测距离为零点几毫米到几十毫米的称为接近觉传感器。
测距传感器的作用可归纳为:
1、发现前方障碍物,限制机器人的运动范围,以避免于障碍物发生碰撞。
2、在接触对象物前得到必要信息,如遇物体的相对距离,相对倾角,以便后续动作准备
3、获取对象物表面各点间的距离,从而得到有关对象表面形状的信息
目前超声波测距传感器主要应用于导航和避障,其他还有焊缝跟踪,物体识别等。机器人测测距传感器采用非接触的测量方法,测量范围环境的物体或者被操作物体的空间位置。非接触测量距离的方法很多,从纳米级微小位移到成千上万公里甚至更远的距离,它们的测量应用了多种原理,采用了各种不同的装置。对于机器人来说,所需测量的距离以便为零点几毫米到几十米远,因此机器人测距传感器的测量范围一般都包含在这个范围内。根据所采用的原理不同,机器人测距传感器的分类也不相同。下面以超声波传感器为例。
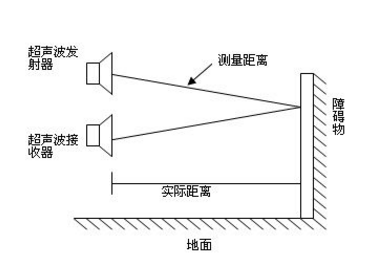
超声波传感器的原理:
超声波传感器是用来测量物体的距离。首先,超声波传感器会发射一组高频声波,一般为40-45KHz,当声波遇到物体后,就会被反弹回,并被接受到。通过计算声波从发射到返回的时间,再乘以声波在媒介中的传播速度(344 米/秒,空气中)。就可以获得物体相对于传感器的距离值了。对于机器人的应用来说,超声波传感器主要用来探测物体的距离以及相对于传感器的方位,以便可以进行避障动作。理想就是矩形,不但可以准确的获得物体的距离值,也可以准确的获得方位值,就是正前方。但是实际上,超声波的波束根据应用不同,有宽波束,和窄波束。宽波束的传感器会检测到任何在波束范围的物体,它可以检测到物体的距离,但是确无法检测到物体的方位,误差高会有100度左右,机器人将无法准确的确定其避障的动作。当然,作为只要探测物体有或者无的用途来说,宽波束的传感器是比较理想的。同理,窄波束可以相对宽波束获得更加精确的方位角。在选择超声波传感器的时候,这个波形特性是必须要考虑的。
虽然多数超声波传感器的工作频率为40-45Khz,远远高于人类能够听到的频率。但是周围环境也会产生类似频率的噪音。比如,电机在转动过程会产生一定的高频,轮子在比较硬的地面上的摩擦所产生的高频噪音,机器人本身的抖动,甚至当有多个机器人的时候,其它机器人超声波传感器发出的声波,这些都会引起传感器接收到错误的信号。这个问题可以通过对发射的超声波进行编码来解决,比如发射一组长短不同的音波,只有当探测头检测到相同组合的音波的时候,才进行距离计算。这样可以有效的避免由于环境噪音所引起的误读。
安全避障是移动机器人研究的一个基本问题。障碍物与机器人之间距离的获得是研究安全避障的前提,超声波传感器以其信息处理简单、价格低廉、硬件容易实现等优点,被广泛用作测距传感器。工釆网提供的机器人超声波传感器 - MB7360,是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,可选的外部温度补偿,使得测量出来的距离数据更加精准。直接输出精确的距离读数,节省了MCU的资源,更合适应用于机器人领域。同时也被广泛应用于机器人测距传感器、自主导航、料仓料位测量、罐体液位测量等领域。

机器人超声波传感器 MB7360 特点:
IP67防尘防水标准封装
体积小低成本方案
高分辨率可达1mm
多种输出方式,包括脉宽、模拟电压、串口
超低功耗适合电池供电系统
内部温度补偿和可选的外部温度补偿
可测距离长达5米
机器人超声波传感器 MB7360参数:
| 检测距离 | 0-5m |
| 分辨率 | 1mm |
| 供电电流 | 2.3-3.1mA |
| 工作电压 | 2.7V-5.5V |
| 超声波测距频率 | 42kHz |
| 采样速率 | 7.5Hz |
| 工作温度 | -40°C ~ +65°C |
| 输出方式 | 模拟输出、脉宽输出、RS232输出 |
| 工作模式 | 自由运行模式和外部触发模式 |
转载请注明出处:传感器应用_仪表仪器应用_电子元器件产品 – 工采资讯 http://news.isweek.cn/6427.html



